Eigendistortions
Run notebook online with Binder:![]()
In this tutorial we will cover:
theory behind eigendistortions
how to use the
plenoptic.synthesize.eigendistortion.Eigendistortionobjectcomputing eigendistortions using a simple input and linear model
computing extremal eigendistortions for different layers of ResNet18
Introduction
How can we assess whether a model sees like we do? One way is to test whether they “notice” image distortions the same way as us. For a model, a noticeable distortion would be an image perturbation that elicits a change in its response. If our goal is to create models with human-like vision, then an image distortion that is (not) noticeable to a human should also (not) be noticeable to our models. Eigendistortions provide a framework with which to compare models to human visual perception of distortions.
Berardino, A., Laparra, V., Ballé, J. and Simoncelli, E., 2017. Eigen-distortions of hierarchical representations. In Advances in neural information processing systems (pp. 3530-3539).
https://www.cns.nyu.edu/pub/lcv/berardino17c-final.pdf
https://www.cns.nyu.edu/~lcv/eigendistortions/
See the last section of this notebook for more mathematical detail
[1]:
import matplotlib.pyplot as plt
import torch
from torch import nn
import plenoptic as po
from plenoptic.synthesize.eigendistortion import Eigendistortion
# so that relative sizes of axes created by po.imshow and others look right
plt.rcParams["figure.dpi"] = 72
# this notebook uses torchvision, which is an optional dependency.
# if this fails, install torchvision in your plenoptic environment
# and restart the notebook kernel.
try:
from torchvision import models
except ModuleNotFoundError:
raise ModuleNotFoundError(
"optional dependency torchvision not found!"
" please install it in your plenoptic environment "
"and restart the notebook kernel"
)
Example 1: Linear model, small 1D input “image”
1.1) Creating the model
The fundamental goal of computing eigendistortions is to understand how small changes (distortions) in inputs affect model outputs. Any model can be thought of as a black box mapping an input to an output, \(f(x): x \in \mathbb{R}^n \mapsto y \in \mathbb{R}^m\), i.e. a function takes as input an n-dimensional vector \(x\) and outputs an m-dimensional vector \(y\).
The simplest model that achieves this is linear,
- :nbsphinx-math:`begin{align}
y &= f(x) = Mx, && text{$Min mathbb{R^{mtimes n}}$}.
end{align}`
In this linear case, the Jacobian is fixed \(J= \frac{\partial f}{\partial x}=M\) for all possible inputs \(x\). Can we synthesize a distortion \(\epsilon\) such that \(f(x+\epsilon)\) is maximally/minimally perturbed from the original \(f(x)\)? Yes! This would amount to finding the first and last eigenvectors of the Fisher information matrix, i.e. \(J^TJ v = \lambda v\).
A few things to note:
Input image should always be a 4D tensor whose dimensions
torch.Size([batch=1, channel, height, width]).We don’t allow for batch synthesis of eigendistortions so the batch dim should always = 1
We’ll be working with the Eigendistortion object and its instance method, synthesize().
Let’s make a linear PyTorch model and compute eigendistortions for a given input.
[2]:
class LinearModel(nn.Module):
"""The simplest model we can make.
Its Jacobian should be the weight matrix of M, and the eigenvectors of the
Fisher matrix are therefore the eigenvectors of M.T @ M"""
def __init__(self, n, m):
super().__init__()
torch.manual_seed(0)
self.M = nn.Linear(n, m, bias=False)
def forward(self, x):
y = self.M(x) # this computes y = x @ M.T
return y
# input vector dim (can you predict what the eigenvec/vals would be when n<m or n=m?
# Feel free to try!)
n = 25
m = 10 # output vector dim
mdl_linear = LinearModel(n, m)
po.tools.remove_grad(mdl_linear)
x0 = torch.ones(
(1, 1, 1, n)
) # input must betorch.Size([batch=1, n_chan, img_height, img_width])
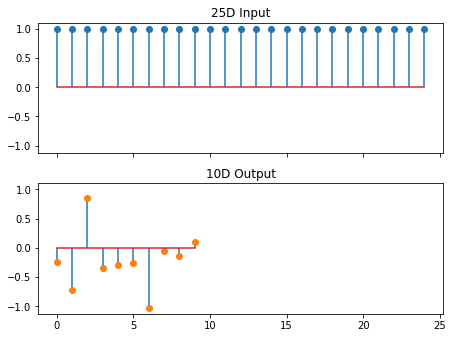
y0 = mdl_linear(x0)
fig, ax = plt.subplots(2, 1, sharex="all", sharey="all")
ax[0].stem(x0.squeeze())
ax[0].set(title=f"{n:d}D Input")
ax[1].stem(y0.squeeze().detach(), markerfmt="C1o")
ax[1].set(title=f"{m:d}D Output")
fig.tight_layout()
1.2 - Synthesizing eigendistortions of linear model
To compute the eigendistortions of this model, we can instantiate an Eigendistortion object with a 4D input image with dims torch.Size([batch=1, n_channels, img_height, img_width]), and any PyTorch model with valid forward and backward methods. After that, we simply call the instance method synthesize() and choose the appropriate synthesis method. Normally our input has thousands of entries, but our input in this case is small (only n=25 entries), so we can compute the full
\(m \times n\) Jacobian, and all the eigenvectors of the \(n \times n\) Fisher matrix, \(F=J^TJ\). The synthesize method does this for us and stores the outputs (eigendistortions, eigenvalues, eigenindex) of the synthesis. These return values point to synthesized_signal, synthesized_eigenvalues, synthesized_eigenindex attributes of the object, respectively.
[3]:
help(Eigendistortion.synthesize) # fully documented
eig_jac = Eigendistortion(
x0, mdl_linear
) # instantiate Eigendistortion object using an input and model
eig_jac.synthesize(method="exact") # compute the entire Jacobian exactly
Help on function synthesize in module plenoptic.synthesize.eigendistortion:
synthesize(self, method: Literal['exact', 'power', 'randomized_svd'] = 'power', k: int = 1, max_iter: int = 1000, p: int = 5, q: int = 2, stop_criterion: float = 1e-07)
Compute eigendistortions of Fisher Information Matrix with given input image.
Parameters
----------
method
Eigensolver method. 'exact' tries to do eigendecomposition directly (
not recommended for very large inputs). 'power' (default) uses the power method to compute first and
last eigendistortions, with maximum number of iterations dictated by n_steps. 'randomized_svd' uses
randomized SVD to approximate the top k eigendistortions and their corresponding eigenvalues.
k
How many vectors to return using block power method or svd.
max_iter
Maximum number of steps to run for ``method='power'`` in eigenvalue computation. Ignored
for other methods.
p
Oversampling parameter for randomized SVD. k+p vectors will be sampled, and k will be returned. See
docstring of ``_synthesize_randomized_svd`` for more details including algorithm reference.
q
Matrix power parameter for randomized SVD. This is an effective trick for the algorithm to converge to
the correct eigenvectors when the eigenspectrum does not decay quickly. See
``_synthesize_randomized_svd`` for more details including algorithm reference.
stop_criterion
Used if ``method='power'`` to check for convergence. If the L2-norm
of the eigenvalues has changed by less than this value from one
iteration to the next, we terminate synthesis.
Initializing Eigendistortion -- Input dim: 25 | Output dim: 10
Computing all eigendistortions
/home/billbrod/Documents/plenoptic/src/plenoptic/tools/validate.py:178: UserWarning: model is in training mode, you probably want to call eval() to switch to evaluation mode
warnings.warn(
1.3 - Comparing our synthesis to ground-truth
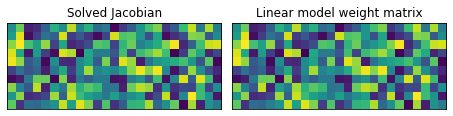
The Jacobian is in general a rectangular (not necessarily square) matrix \(J\in \mathbb{R}^{m\times n}\). Since this is a linear model, let’s check if the computed Jacobian (stored as an attribute in the Eigendistortion object) matches the weight matrix \(M\).
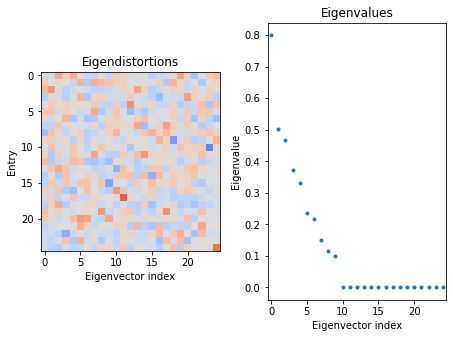
Since the eigendistortions are each 1D (vectors) in this example, we can display them all as an image where each column is an eigendistortion, each pixel is an entry of the eigendistortion, and the intensity is proportional to its value.
[4]:
fig, ax = plt.subplots(1, 2, sharex="all", sharey="all")
ax[0].imshow(eig_jac.jacobian)
ax[1].imshow(
mdl_linear.M.weight.data,
vmin=eig_jac.jacobian.min(),
vmax=eig_jac.jacobian.max(),
)
ax[0].set(xticks=[], yticks=[], title="Solved Jacobian")
ax[1].set(title="Linear model weight matrix")
fig.tight_layout()
print(
"Jacobian == weight matrix M?:",
eig_jac.jacobian.allclose(mdl_linear.M.weight.data),
)
# Eigenvectors (aka eigendistortions) and associated eigenvectors are found in the
# distortions dict attribute
fig, ax = plt.subplots(1, 2, sharex="all")
ax[0].imshow(eig_jac.eigendistortions.squeeze(), vmin=-1, vmax=1, cmap="coolwarm")
ax[0].set(title="Eigendistortions", xlabel="Eigenvector index", ylabel="Entry")
ax[1].plot(eig_jac.eigenvalues, ".")
ax[1].set(title="Eigenvalues", xlabel="Eigenvector index", ylabel="Eigenvalue")
fig.tight_layout()
Jacobian == weight matrix M?: True
1.4 - What do these eigendistortions mean?
The first eigenvector (with the largest eigenvalue) is the direction in which we can distort our input \(x\) and change the response of the model the most, i.e. its most noticeable distortion. For the last eigenvector, since its associated eigenvalue is 0, then no change in response occurs when we distort the input in that direction, i.e. \(f(x+\epsilon)=f(x)\). So this distortion would be imperceptible to the model.
In most cases, our input would be much larger. An \(n\times n\) image has \(n^2\) entries, meaning the Fisher matrix is \(n^2 \times n^2\), and therefore \(n^2\) possible eigendistortions – certainly too large to store in memory. We need to instead resort to numerical methods to compute the eigendistortions. To do this, we can just set our synthesis method='power' to estimate the first eigenvector (most noticeable distortion) and last eigenvector (least noticeable
distortion) for the image.
[5]:
eig_pow = Eigendistortion(x0, mdl_linear)
eig_pow.synthesize(method="power", max_iter=1000)
eigdist_pow = (
eig_pow.eigendistortions.squeeze()
) # squeeze out singleton channel dimension (these are grayscale)
eigdist_jac = eig_jac.eigendistortions.squeeze()
print(f"Indices of computed eigenvectors: {eig_pow.eigenindex}\n")
fig, ax = plt.subplots(1, 1)
ax.plot(eig_pow.eigenindex, eig_pow.eigenvalues, ".", markersize=15, label="Power")
ax.plot(eig_jac.eigenvalues, ".-", label="Jacobian")
ax.set(
title="Power method vs Jacobian",
xlabel="Eigenvector index",
ylabel="Eigenvalue",
)
ax.legend(title="Synth. method")
fig, ax = plt.subplots(1, 2, sharex="all", sharey="all", figsize=(8, 3))
ax[0].plot(eigdist_pow[0] - eigdist_jac[0])
ax[0].set(title="Difference in first eigendists")
ax[1].stem(eigdist_pow[-1] - eigdist_jac[-1])
ax[1].set(title="Difference in last eigendists")
fig, ax = plt.subplots(1, 1)
ax.stem(eigdist_jac @ eigdist_pow[-1])
ax.set(
title="Power method's last eigenvec projected on all Jacobian method's eigenvec",
xlabel="Eigenvector index",
ylabel="Projection",
)
print(
"Are the first eigendistortions the same?",
eigdist_pow[0].allclose(eigdist_jac[0], atol=1e-3),
)
print(
"Are the last eigendistortions the same?",
eigdist_pow[-1].allclose(eigdist_jac[-1], atol=1e-3),
)
# find eigendistortions of Jacobian-method whose eigenvalues are zero
ind_zero = eig_jac.eigenvalues.isclose(torch.zeros(1), atol=1e-4)
Initializing Eigendistortion -- Input dim: 25 | Output dim: 10
Top k=1 eigendists computed | Stop criterion 1.00E-07 reached.
Bottom k=1 eigendists computed | Stop criterion 1.00E-07 reached.
Indices of computed eigenvectors: tensor([ 0, 24])
Are the first eigendistortions the same? True
Are the last eigendistortions the same? False
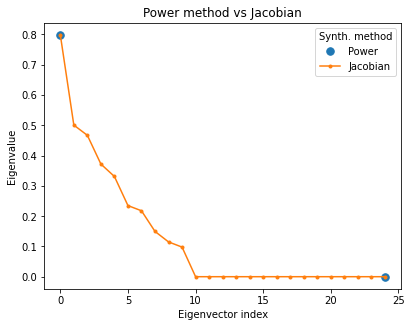
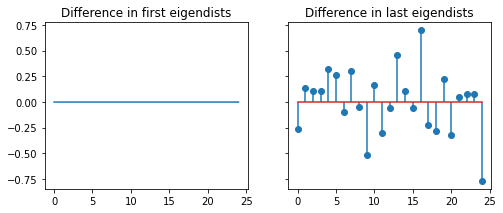
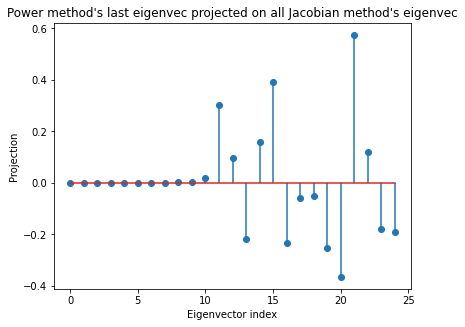
The power method’s first eigendistortion matches the ground-truth first eigendistortion obtained via the Jacobian solve. And while the last eigendistortions don’t match, the last power method eigendistortion lies in the span of all the eigendistortions whose eigenvalues are zero. Each of these eigendistortions whose eigenvalues are zero are equivalent. Any distortion of \(x\) in the span of these eigendistortions would result in no change in the model output, and would therefore be imperceptible to the model.
1.5 - The Fisher information matrix is a locally adaptive
Different inputs should in general have different sets of eigendistortions – a noticible distortion in one image would not necessarily be noticeable in a different image. The only case where they should be the same regardless of input is when the model is fully linear, as in this simple example. So let’s check if the Jacobian at a different input still equals the weight matrix \(M\).
[6]:
x1 = torch.randn_like(x0) # generate some random input
eig_jac2 = Eigendistortion(x1, model=mdl_linear)
eig_jac2.synthesize(
method="exact"
) # since the model is linear, the Jacobian should be the exact same as before
print(
f"Does the jacobian at x1 still equal the model weight matrix?"
f" {eig_jac2.jacobian.allclose(mdl_linear.M.weight.data)}"
)
Initializing Eigendistortion -- Input dim: 25 | Output dim: 10
Computing all eigendistortions
Does the jacobian at x1 still equal the model weight matrix? True
Example 2: Which layer of ResNet is a better model of human visual distortion perception?
Now that we understand what eigendistortions are and how the Eigendistortion class works, let’s compute them real images using a more complex model like Vgg16. The response vector \(y\) doesn’t necessarily have to be the output of the last layer of the model; we can also compute Eigendistortions for intermediate model layers too. Let’s synthesize distortions for an image using different layers of Vgg16 to see which layer produces extremal eigendistortions that align more with human
perception.
2.1 - Load an example an image
[10]:
n = 128 # this will be the img_height and width of the input, you can change this to
# accommodate your machine
img = po.data.color_wheel()
# center crop the image to nxn
img = po.tools.center_crop(img, n)
po.imshow(img, as_rgb=True, zoom=3)
2.2 - Instantiate models and Eigendistortion objects
Let’s make a wrapper class that can return the nth layer output of vgg. We’re going to use this to compare eigendistortions synthesized using different layers of Vgg as models for distortion perception.
[11]:
# Create a class that takes the nth layer output of a given model
class NthLayer(torch.nn.Module):
"""Wrap any model to get the response of an intermediate layer
Works for Resnet18 or VGG16.
"""
def __init__(self, model, layer=None):
"""
Parameters
----------
model: PyTorch model
layer: int
Which model response layer to output
"""
super().__init__()
try:
# then this is VGG16
features = list(model.features)
except AttributeError:
# then it's resnet18
features = (
[model.conv1, model.bn1, model.relu, model.maxpool]
+ [layer for layer in model.layer1]
+ [layer for layer in model.layer2]
+ [layer for layer in model.layer3]
+ [layer for layer in model.layer4]
+ [model.avgpool, model.fc]
)
self.features = nn.ModuleList(features).eval()
if layer is None:
layer = len(self.features)
self.layer = layer
def forward(self, x):
for ii, mdl in enumerate(self.features):
x = mdl(x)
if ii == self.layer:
return x
# different potential models of human visual perception of distortions
resnet18_a = NthLayer(models.resnet18(pretrained=True), layer=3)
po.tools.remove_grad(resnet18_a)
resnet18_b = NthLayer(models.resnet18(pretrained=True), layer=6)
po.tools.remove_grad(resnet18_b)
ed_resneta = Eigendistortion(img, resnet18_a)
ed_resnetb = Eigendistortion(img, resnet18_b)
/home/billbrod/micromamba/envs/plenoptic/lib/python3.10/site-packages/torchvision/models/_utils.py:208: UserWarning: The parameter 'pretrained' is deprecated since 0.13 and may be removed in the future, please use 'weights' instead.
warnings.warn(
/home/billbrod/micromamba/envs/plenoptic/lib/python3.10/site-packages/torchvision/models/_utils.py:223: UserWarning: Arguments other than a weight enum or `None` for 'weights' are deprecated since 0.13 and may be removed in the future. The current behavior is equivalent to passing `weights=ResNet18_Weights.IMAGENET1K_V1`. You can also use `weights=ResNet18_Weights.DEFAULT` to get the most up-to-date weights.
warnings.warn(msg)
Initializing Eigendistortion -- Input dim: 49152 | Output dim: 65536
Initializing Eigendistortion -- Input dim: 49152 | Output dim: 32768
2.3 - Synthesizing distortions
The input dimensionality in this example is huge compared to our linear model example – it is \((\textrm{n_chan} \times \textrm{img_height} \times \textrm{img_width})^2\), meaning the Fisher matrix is too massive to compute exactly. We must turn to iterative methods. Let’s synthesize the extremal eigendistortions for this picture of Einstein using the different layers of ResNet as defined above.
[12]:
# Bump up n_steps if you wish
ed_resneta.synthesize(method="power", max_iter=400)
ed_resnetb.synthesize(method="power", max_iter=400)
Top k=1 eigendists computed | Stop criterion 1.00E-07 reached.
Top k=1 eigendists computed | Stop criterion 1.00E-07 reached.
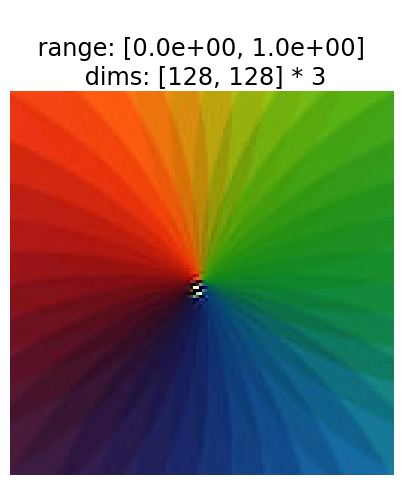
2.4 - Visualizing eigendistortions
Let’s display the eigendistortions. Eigendistortion has an instance method display that will display a 2x3 subplot figure of images. The top row shows the original image on the left, the synthesized maximal eigendistortion on the right, and some constsant \(\alpha\) times the eigendistortion added to the image in the middle panel. The bottow row has a similar layout, but displays the minimal eigendistortion. Let’s display the eigendistortions for both models.
[13]:
po.synth.eigendistortion.display_eigendistortion(ed_resneta, 0, as_rgb=True, zoom=3)
po.synth.eigendistortion.display_eigendistortion(ed_resneta, -1, as_rgb=True, zoom=3)
2.5 - Which synthesized extremal eigendistortions better characterize human perception?
Let’s compare eigendistortions within a model first. One thing we immediately notice is that the first eigendistortion (labeled maxdist) is indeed more noticeable than mindist. maxdist is localized to a single portion of the image, and has lower, more prominent spatial frequency content than mindist. mindist looks more like high frequency noise distributed across the image.
But how do the distortions compare between models – which model better characterizes human visual perception of distortions? The only way to truly this is to run an experiment and ask human observers which distortions are most/least noticeable to them. The best model should produce a maximally noticeable distortion that is more noticeable than other models’ maximally noticeable distortions, and its minimally noticeable distortion should be less noticeable than other models’ minimally noticeable distortions.
See Berardino et al. 2017 for more details.
2.6 - Synthesizing distortions for other images
Remember the Fisher matrix is locally adaptive, meaning that a different image should have a different set of eigendistortions. Let’s finish off this notebook with another set of extremal eigendistortions for these two Vgg16 layers on a different image.
[14]:
img = po.data.curie()
# center crop the image to nxn
img = po.tools.center_crop(img, n)
# because this is a grayscale image but ResNet expects a color image,
# need to duplicate along the color dimension
img3 = torch.repeat_interleave(img, 3, dim=1)
ed_resneta = Eigendistortion(img3, resnet18_a)
ed_resnetb = Eigendistortion(img3, resnet18_b)
ed_resneta.synthesize(method="power", max_iter=400)
ed_resnetb.synthesize(method="power", max_iter=400)
po.imshow(img, zoom=2, title="Original")
Initializing Eigendistortion -- Input dim: 49152 | Output dim: 65536
Initializing Eigendistortion -- Input dim: 49152 | Output dim: 32768
Top k=1 eigendists computed | Stop criterion 1.00E-07 reached.
Top k=1 eigendists computed | Stop criterion 1.00E-07 reached.

[15]:
po.synth.eigendistortion.display_eigendistortion(
ed_resneta, 0, as_rgb=True, zoom=2, title="top eigendist"
)
po.synth.eigendistortion.display_eigendistortion(
ed_resneta, -1, as_rgb=True, zoom=2, title="bottom eigendist"
)
po.synth.eigendistortion.display_eigendistortion(
ed_resnetb, 0, as_rgb=True, zoom=2, title="top eigendist"
)
po.synth.eigendistortion.display_eigendistortion(
ed_resnetb, -1, as_rgb=True, zoom=2, title="bottom eigendist"
)




Appendix: More mathematical detail
If we have a model that takes an N-dimensional input and outputs an M-dimensional response, then its Jacobian, \(J=\frac{\partial f}{\partial x}\), is an \(M\times N\) matrix of partial derivatives that tells us how much a change in each entry of the input would change each entry of the output. With the assumption of additive Gaussian noise in the output space Fisher Information Matrix, \(F\), is a symmetric positive semi-definite, \(N\times N\) matrix computed using the Jacobian, \(F=J^TJ\). If you are familiar with linear algebra, you might notice that the eigenvectors of \(F\) are the right singular vectors of the Jacobian. Thus, an eigendecomposition \(F=V\Lambda V\) yields directions of the input space (vectors in \(V\)) along which changes in the output space are rank-ordered by entries in diagonal matrix \(\Lambda\).
Given some input image \(x_0\), an eigendistortion is an additive perturbation, \(\epsilon\), in the input domain that changes the response in a model’s output domain of interest (e.g. an intermediate layer of a neural net, the output of a nonlinear model, etc.). These perturbations are named eigendistortions because they push \(x_0\) along eigenvectors of the Fisher Information Matrix. So we expect distortions \(x_0\) along the direction of the eigenvector with the maximum eigenvalue will change the representation the most, and distortions along the eigenvector with the minimum eigenvalue will change the representation the least. (And pushing along intermediate eigenvectors will change the representation by an intermediate amount.)